آسانسور یا بالابر (به فرانسوی: ascenseur)، اتاقک متحرکی است که به وسیلهٔ آن از طبقهای به طبقات بالا روند و یا از طبقهٔ بالا به پایین فرود آیند. به عبارت دیگر آسانسور تجهیزات حمل و نقل عمودی است که حرکت مردم و یا کالا بین طبقات را تسهیل میبخشد. آسانسور معمولاً به کمک موتور الکتریکی باعث حرکت عمودی کابین میشود.
پیشینه
از بررسی معماری ساختمانها در گذشته میتوان فهمید که در گذشته توان ساخت ساختمانهای بلند وچود داشتهاست ولی شاید دلیل اینکه چرا این کار چندان رواج نداشته، وجود پلههای بسیار بودهباشد. این مشکل همچنان پابرجا بود تا اینکه یک مکانیک آمریکایی به نام الیشا اوتیس ایمنی را در بالابر با به کارگیری چرخی ضامندار که در صورت پارهشدن طناب، اندکی پس از سقوط بالابر را متوقف میکرد، فراهم کرد. این اختراع که در سال 1854 در نمایشگاهی در نیویورک پردهبرداری شد، مقدمهای برای کاربرد گستردهٔ بالابر بود. ناصرالدین شاه در سفرنامه فرنگ خویش در تعریف و توصیف آسانسور میگوید: رفتیم به مریضخانه سنت توماس ... از مرتبههای زیر اسبابی دارند که ناخوش را روی تخت گذاشته از توی اطاق زیر میکشند به مرتبه بالا میبرند. بسیار تماشا داشت که ناخوش حرکت نکند.
در حال حاضر یکی از مشکلات ساختمانهای بزرگ کافی نبودن فضای در نظر گرفته شده برای آسانسور است. این امر یعنی پیشبینی و منظور نمودن فضای کافی با محاسبه تعداد ظرفیت و سرعت مناسب آسانسورها باتوجه به ارتفاع و جمعیت ساکن و کاربری ساختمان باید در ابتدای کار یعنی در زمان طراحی ساختمانها مد نظر قرار گیرد؛ وگرنه پس از اجرای ساختمان معمولاً افزایش فضای چاه آسانسور بسیار مشکل و در اکثر موارد غیر ممکن است.
آسانسور وسیلهای است الکترومکانیکی، در ابتدای اختراع آسانسور به شکل امروزی، بیشتر قطعات و لوازم آسانسورها مکانیکی و الکتریکی بود ولی با پیشرفت علوم در حوزه الکترونیک و نیمههادیها و همچنین ورود حوزه علوم هوش مصنوعی به صنعت این وسیله نیز تکامل یافت و به عنوان یک وسیله کاملاً کاربردی با حوزه سطح دسترسی کاملاً گسترده در بین جوامع شهری قرار گرفت. در طراحی آسانسور علومی همچون مکانیک، برق و الکترونیک، معماری و صنایع مورد استفادهاست. به همین علت هیچگاه یک متخصص به تنهایی قادر نخواهد بود که یک آسانسور را به تنهایی و با تکیه بر یکی از شاخههای علوم طراحی نماید. تا قبل از دهه 1990، عمده اموزشها در این صنعت بصورت اموزشهای محدود و استاد و شاگردی و صرفاً در کارخانههای بزرگ آسانسورسازی معمول بود. به همین سبب آموزش در این صنعت محدود و پنهان بود. برای اولین بار در سال 1995 میلادی اتحادیه آسانسور و پله برقی انگلستان (leia) با همکاری پروفسور یانوفسکی و پروفسور جینا بارنی اقدام به برگزاری دورههای آموزشی کوتاه مدت ماژولاری در انگلستان نمود که بیشتر مورد استفاده نصابان و متخصین این کشور بود. در ادامه این اتحادیه با همکاری دانشگاه نورث همپتون انگلستان دورههای دانشگاهی این رشته را در مقطع کاردانی و کارشناسی آغاز نمود. اولین دوره این مقاطع در سال 1998 در نورث همپتون انگلستان با هدایت جانات آدامز، برایان واتز، استفان کازمارسیزیک که از اعضای هیئت علمی دانشکده مهندسی مکانیک و علوم کاربردی بودند آغاز شد. از سال 2000 به بعد مقاطع کارشناسی ارشد و دکتری تخصصی تحت عنوان elevator and escalator engineering آغاز گشت.
انواع آسانسور
تمامی آسانسورها در داشتن خصوصیاتی مانند داشتن کابین، حرکت عمودی و توقف در سطوح مختلف با هم مشابه اند. اما از لحاظ نحوه اعمال نیروی محرکه به کابین متفاوت هستند که معمولاً به سه دسته آسانسورهای کششی، هیدرولیک و وینچی تقسیم می شوند(البته نوع فوق پیشرفته دیگری که مغناطیسی می باشد وجود دارد).
آسانسورهای کششی
نیروی محرکه در این نوع آسانسورها از یک موتورالکتریکی که معمولاً در بالای چاه آسانسور و در محلی به نام موتورخانه نصب گردیده، تامین می شود. بر روی فلکه این موتور تعدادی کابل فولادی (اصطلاحاً سیم بکسل) وجود دارد که از یک سمت به کابین آسانسور و از سمت دیگر به وزنههای آسانسور که درون قابی فلزی به نام قاب وزنه قرار دارند، متصل است. جنس این وزنه ها معمولاً از چدن یا بتن است. وزن این وزنه ها به اندازه وزن کابین به علاوه نصف ظرفیت کابین است. وزن هر نفر در محاسبات مربوط به آسانسور 75 کیلوگرم است. دلیل قرار دادن وزنه در سیستم آسانسور کمک به بالا بردن آسانسور است در غیر اینصورت برای این کار باید موتورهای بسیار قوی با کیلووات بالا استفاده کرد. پس با این کار توان موتور مورد استفاده کاهش مییابد. طبیعی است که این وزنه در پایین آمدن آسانسور مزاحمت ایجاد میکند، اما چون هر جسم بدون دخالت به پایین سقوط میکند پس استفاده از وزنه مانعی بزرگی در حرکت آسانسور ایجاد نمیکند.
اساس کار این نوع آسانسورها بر اساس نیروی اصطکاک بین سیم بکسلها و فلکه موتور است. در داخل فریم وزنه به اندازه وزن کابین به اضافه نصف ظرفیت کابین وزنه وجود دارد. مثلاً اگر ظرفیت کابین 900 کیلوگرم باشد(یعنی آسانسور نفربر 12 نفره چون متوسط وزن هر نفر 75 کیلو گرم است)باندازه 450 کیلوگرم باضافه وزن کابین در کادر وزنه، وزنه وجود دارد. با کمک این وزنه، نیروی کشش لازم برای حرکت کابین کاهش می یابد چرا که در صورت رعایت کردن ظرفیت کابین، اختلاف وزن بین کادر وزنه و کابین تحت هر شرایطی از نصف ظرفیت کابین (در مثال قبل 450 کیلوگرم) بیشتر نخواهد شد و در حرکت به سمت بالا یا پایین سیستم کشش آسانسور حداکثر برای جابه جایی جرمی به اندازه نصف ظرفیت کابین توان مصرف خواهد کرد.
آسانسورهای هیدرولیک
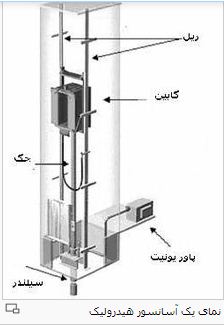
امروزه آسانسورهای هیدرولیکی نیز جای خود را در بین کاربران خانگی باز کردهاند. در اروپا بیش از 70 درصد از آسانسورهای زیر 5 طبقه هیدرولیک استفاده می شوند که از محاسن این نوع آسانسورها میتوان به نرمی حرکت در استارت اولیه ؛ خرابی و استهلاک بسیار کم ؛ سهولت در عیب یابی و تعمیر ؛ ایجاد آسانسورهای زیبا و شیشه ای به دلیل حذف کادر وزنه و سیم بکسل ؛ احتیاج به سازه سبک ؛ عدم نیاز به موتورخانه در پشت بام ؛ ایجاد آسانسورهای باربر و سنگین با تناژ بالا و زیبایی بام خانه و همچنین تراز شدن دقیق آن در طبقات اشاره نمود اما از محدودیتهای استفاده از این نوع آسانسورها میتوان به محدودیت در ارتفاع و کندی نسبی سرعت آنها و تنها قرارگیری در چاهک را اشاره کرد.( البته امروزه با استفاده از درایو و سیستم خنک کننده می توان به سرعت 1 متر به صورت معمول دست یافت. آسانسورهای هیدرولیک با پمپ فشار روغن و جک هیدرولیک کار میکنند.
در آسانسورهای هیدرولیک به خاطر اینکه کادر وزنه وجود ندارد و سیستم جک هیدرولیکی باید تمامی کابین و مسافران را جا به جا کند نیاز به موتورهای قوی تری هست. در این آسانسورها یک موتور سه فاز غوطه ور در روغن به همراه یک شیرالکتریکی مخصوص که اصطلاحاً پاور یونیت نامیده می شوند وظیفه تامین فشار روغن برای جک هیدرولیک را داراست. برای راه اندازی موتور به خاطر وجود موتورهای قوی تر در صورت استفاده از درایو یا سافت استارتر نیاز به هزینه بسیار بالاتری است پس لذا معمولاً برای شروع به کار موتور پمپ هیدرولیک از سیستم رایج ستاره - مثلث استفاده می شود. اما این موتور و فشار تنها در حرکت به سمت بالا مورد نیاز است و برای حرکت کابین به سمت پایین نیازی به روشن کردن موتور و مصرف توان نیست و تنها با بازکردن یک شیر و خالی کردن روغن جک کابین به آرامی به سمت پایین حرکت می کند. به عبارت دیگر یک سیستم هیدرولیک تنها در نیمی از مسافت حرکتی خود (تنها به سمت بالا) خود توان قابل ملاحظه ای مصرف می کند و در نیمه دیگر (تنها به سمت پایین) از نیروی گرانش استفاده می کند و این موضوع مصرف برق بالاتر آن نسبت به آسانسورهای دوسرعته را منتفی می کند.
آسانسورهای وینچی
نوعی آسانسور است که با زنجیر یا طناب فولادی آویزان شده و نیروی رانش به طریقی به غیر از اصطکاک به آن وارد می شود. در این نوع آسانسورها قاب وزنه وجود ندارد.
نیروی محرکه
نیروی محرکه موتور آسانسورها سابقاً از موتورهای جریان مستقیم و توسط برق برق جریان مستقیم بود که برای این گونه موتورها از راه اندازهای گوناگونی همانند وارد - لئونارد استفاده می شد. با از دور خارج شدن موتورهای جریان مستقیم (dc) و معرفی موتورهای القایی سه فاز سالهاست که از موتورهای الکتریکی سه فاز القایی یا آسنکرون و اخیراً از موتورهای مغناطیس دائم (pm) و یا سنکرون استفاده می شود. در این موتورها از مکانیسم لنت ترمز استفاده می شود که با استفاده از نیروی اصطکاک مانع از حرکت ناخواسته موتور در حالت توقف می شود.
موتورهای القایی مورد استفاده در آسانسور به همراه گیربکس (جعبه دنده) و چرخ طیار به کار می روند. این موتورها در ابتدا دارای یک استاتور و تک سرعته بودند. این سیستم دارای اشکالاتی از جمله تکان شدید در هنگام کار بود. به خاطر همین تکان شدید بود که سرعت نهایی کابین در این موتورها کم بود. پس از مدتی موتورهای دوسرعته به بازار عرضه شدند. این موتورها دارای دو استاتور جدا گانه هستند که برای دو سرعت تند و کند به کار می روند. تعداد قطب استاتور دور کند معمولاً چهار برابر دور تند است که باعث می شود سرعت دور کند موتور یک چهارم دور تند باشد. در این نوع موتورها استارت کار موتور با دور تند است. دو عامل یعنی نیروی عکس العمل دنده ها در گیربکس و وجود چرخ طیار یا فلای ویل متصل به محور روتور موتور که دارای لختی دورانی است، مانع از تشدید تکان ها می شوند. برای توقف موتور با استفاده از یک مدار الکتریکی استاتور دور کند وارد مدار شده و دور تند از مدار خارج می شود. تغییر جهت حرکت نیز با جابه جایی دو فاز امکان پذیر است.
با معرفی سیستم های کنترل دور موتور القایی که متشکل از یک مبدل (یکسو ساز) و یک اینورتر هستند، استفاده از آنها در صنعت آسانسور به سرعت پیشرفت کرد. مزیت های این درایورها عبارتند از: نرمی حرکت و توقف، بهبود ضریب توان و کاهش بار رآکتیو شبکه برق، امکان استفاده از موتورهای تک استاتوره و حذف چرخ طیار یا فلایویل و در نتیجه کاهش برق مصرفی. این داریورها که انواع مخصوص استفاده در تابلو فرمان آسانسور آن نیز عرضه شده است، با تغییر فرکانس، نمودار حرکتی منظمی از شروع تا انتها و ایستادن آسانسور ایجاد میکند. در انواع پیشرفته تر این درایورها معمولاً امکان اتصال به یک تاکومتر یا انکودر نیز وجود دارد. این انکودر با اتصال به محور موتور امکان کنترل حلقه بسته را برای درایور فراهم می کند. وجود فیدبک برای یک سیستم کنترل بسیار حایز اهمیت است و باعث نرمی حرکت فوق العاده در آسانسور می شود.
در هنگام توقف آسانسور به علت بالا بودن اندازه حرکت(تکانه) کابین گاهی اوقات موتور به صورت ژنراتوری کار می کند و نیاز است که انرژی تولید شده توسط موتور در جایی تخلیه شود. در آسانسورهای دوسرعته و در سیستم های قدیمی این انرژی به شبکه برق برگشت داده می شد اما در درایور ها به علت وجود یکسوساز، این انرژی قابل برگشت نیست و باعث ازدیاد شدید ولتاژ بر روی بانک خازنی موجود در درایور شده و امکان آسیب زدن به آن وجود دارد. به همین منظور از یک مقاومت با توان بالا جهت تخلیه این انرژی استفاده می شود که به آن اصطلاحاً مقاومت ترمز گفته می شود.
اما با همه این ها موتورهای القایی با گیربکس معایبی نیز دارند. از جمله آنها پایین بودن بازده الکتریکی موتور (در حدود هشتاد درصد) و پایین بودن بازده مکانیکی گیربکس (در حدود 45 درصد) که موجب افزایش هزینه ها و استهلاک سیستم می شود. به همین خاطر موتورهای سنکرون با مغناطیس دائم کم کم در صنعت آسانسور پدیدار شدند که بازده نهایی آنها گاهی به 95 درصد هم می رسد. گشتاور بسیار بالاتر محور موتور باعث می شود که نیازی به استفاده از گیربکس در این موتورها نباشد.این موتورها دارای سیستم راه اندازی پیچیدهای هستند و لزوماً باید با استفاده از درایور و تاکومتر مورد استفاده قرار بگیرند.
تابلو فرمان آسانسور
آسانسورها در گذشته نه چندان دور بوسیله تابلوهای رلهای فرماندهی میشدند. فرمان از این تابلوها به موتورهای به اصطلاح دوسرعته میرسید. این موتورها بوسیله دو سیم پیچی که داشتند قادر بودند با دو سرعت حرکت تند و کند کنند. آسانسور با سرعت تند حرکت میکرد و برای ایستادن در سطح طبقات و کاهش تکان زمان ایستادن با تغییر به سرعت کند و طی مسیر کوتاهی با این سرعت میایستاد.
ایراد بزرگ این سیستم تکان در سه زمان در حرکت است. تکان در هنگام راه افتادن, تغییر سرعت به دور کند و ایستادن است. ایراد دیگر مصرف بالای برق و کاهش ضریب توان در این سیستم بدلیل اتصال مستقیم برق سهفاز به موتور جهت حرکت است. ضمناً ابعاد این تابلوها بسیار بزرگ و سیستم آن بسیار پیچیده بود و رفع خرابی آن به زمان و مهارت بسیاری نیاز داشت.
ایراد دیگر این سیستم متغیر بودن سطح کابین با طبقات با بارهای متفاوت است چون بدلیل عدم اطلاع موتور از وزن کابین (پر یا خالی بودن آن) همیشه نیروی یکسانی به موتور وارد میشود. ایراد دیگر این سیستم آسیب هایی است که در دراز مدت به موتور بدلیل اتصال ناگهانی ولتاژ وارد و باعث کاهش عمر مفید آن میشود. ضمناً این شوک در هنگام استارت آسانسور باعث نوسان ناگهانی ولتاژ میشود که نه تنها برای آسانسور بلکه برای سایر وسایل برقی مضر است. هر چند از این آسانسورها دیگر نصب نمیشود اما تعداد قابل توجهی از این آسانسورهای قدیمی در حال کارکردن هستند.
اما برای رفع اشکالات این تابلوهای رلهای بتدریج تابلوهای میکروپروسسوری وارد بازار شد. که در آن آیسیها و میکروها جایگزین رله ها شدند و با زبانهای مختلف برنامهنویسی برنامهریزی میشدند تا حجم تابلوها کوچکتر شود و تعمیرات و رفع خرابی آن توسط افراد متخصصتر اما با راحتی بیشتری انجام شود.
این نوع تابلو که به تابلوی دوسرعته معروف است تمام ایرادات تابلوهای رلهای را جز ابعاد بزرگ و پیچیدگی تابلو داراست. نصب این تابلو همچنان ادامه دارد با اینکه بدلیل تاثیرات مخرب بر ولتاژ و مصرف بالا در برخی شهرهای بزرگ در ایران ممنوع شدهاست. اما در ساختمانهایی که نیاز به پروانه پایان کار ندارند و یا در تعمیرات آسانسورهای قدیمی همچنان به دلیل قیمت پایین تر آن نسبت به تابلوهای جدید پیشنهاد میشود. با پیشرفت الکترونیک صنعتی و ارزانتر شدن اینورترها استفاده از آنها در تابلوهای فرمان آسانسور رایج شده است و کم کم جایگزین سیستمهای کنتاکتوری میشوند. کاهش تکان ها در هنگام تغییر سرعت و افزایش ضریب توان به دلیل اتصال با واسطه از طریق بانک خازنی اینورتراز مزایای تابلوهای فرمان اینورتری است که به تابلوهای درایودار شناخته می شوند. آسانسور کلمه ای فرانسوی میباشد.
2. دربــــاره پـــــــــلـــه بـــــــــرقــــی:
پله برقی گونهای نقاله جابجایی است که برای جابجا کردن افراد بهکار میرود. پله برقی از پلههای بههمپیوستهای تشکیل شده که به حالت افقی میمانند و برای بالا و پایین بردن افراد استفاده میشود.
پله برقی یک چرخه تکرارشونده از پلههای در گردش است، که در آن پلههای بازگشتی در زیر پلههای بالایی پنهان شدهاند. وزن پلههای پنهان با وزن پلههای آشکار موازنه و برابری میکند، بنابراین موتور پله برقی بایستی تنها وزن افراد روی پله برقی را (که در حال بالا یا پایین رفتن هستند) تحمل کند.
پله های برقی از نظر کاربردی به 3دسته semi out door -indoor- out door تقسیم میگردد که به ترتیب در محیط آزاد(بیرون از ساختمان) ، محیط بسته(داخل ساختمان) و نیمه بسته(پل های عابر پیاده) استفاده می گردند. پله های مکانهای عمومی به صورت heavy duty طراحی می گردد که همان پله های معمولی تقویت شده میباشند که برای کار در شرایط دشوار طراحی می گردند. پله های برقی معمولا در دو زاویه 30و 35 درجه طراحی میگردند البته در مکانهای مسطح 0 تا 12 درجه هم تولید میگردد که به آنها راهروی متحرک یا auto walk می گویند. مزایای زیادی برای پلههای برقی میتوان برشمرد. با وجود اشغال فضایی تقریبا همسان با پلکان معمولی، یک پله برقی میتواند شمار زیادی از افراد را جابجا کند. در صورت رعایت قانون باز گذاشتن سمت چپ برای راهروندگان در پله برقی، این پلهها میتوانند جابجایی بسیار سریع افراد را میسر کنند. قیمت پله های برقی نسبت به ارتفاع کف تا کف جابجایی تعیین می گردد.
آمارها نشان میدهد که در ایالات متحده آمریکا در سال 2004 تعداد 30 هزار پله برقی وجود داشت و در آن کشور هر ساله 90 میلیارد جابجایی افراد بر روی این پلهها انجام میگیرد.
درون پله برقی
پله های برقی دارای موتور الکتریکی می باشند که نسبت با ارتفاع بالابری 4.5-8-11 کیلووات یا حتی بالاتر طراحی می گردند.پله های پله برقی که به استپ معروف هستند دارای دو چرخ در دو طرف می باشند که روی زنجیری به نام استپ چین قرار مگیرند.استپ چین به دور شفت اصلی قرار میگیرد و شفت توسط زنجیرموتور به موتور متصل می گردد.پله های برقی دارای میکروسوییچ های امنیتی می باشند که از صدمه زدن دستگاه به خودش یا مسافر جلو گیری میکند.اکثر پله های برقی دارای سیستم ترمز مغناطیسی می باشند.
نصب پله برقی
از نکات جالب در مورد پله برقی می توان به نحوه نصب آن اشاره کرد. پله های برقی میبایست به گونه ای طراحی گردد که بر روی تیر های اصلی سازه قرار گیرد و تنها با نیروی وزن و بدون استفاده از جوشکاری یا پیچ و پرچ بر روی نشیمن گاه قرار می گیرند.برای پله های برقی با ارتفاع بالای 6متر پایه میانی نیز طراحی میگردد.پله های برقی نسبت به ارتفاع کف تا کف و نیز شرایط محیطی پروژه به تکه های متعدد تقسیم میگردد و به محل پروژه ارسال و توسط نیروی متخصص نصب و منتاژ می گردد. پله برقی نیز مانند سایر دستگاههای مکانیکی نیاز به سرویس و نگهداری ماهیانه دارند که این امر میبایست توسط متخصصین انجام گردد.
پیشینه
نخستین پله برقی توسط جس وبلیورنو در سال 1881 میلادی در ایالات متحده آمریکا ساختهشد و از آن برای انتقال دیرکهای چوبی و میلههای فلزی به درون کشتیها استفاده میشد. نام پله برقی برای نخستین بار در سال 1900 میلادی برای پلکان متحرکی به کار رفت که در نمایشگاهی در شهر پاریس به نمایش گذاشته شده بود. بیشینهٔ ارتفاع پلههای برقی امروز 18 متر است.





.png)
.png)
.png)
.png)
.png)

(3)(4)(5).jpg)